Example 5
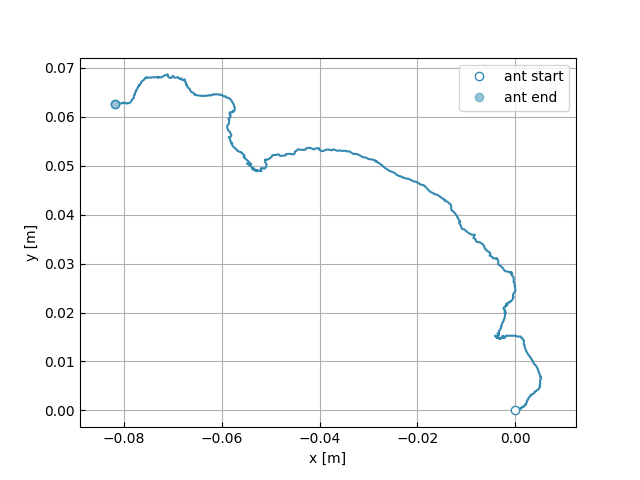
Simultaneous tracking of an ant and the camera capturing its movement with the reconstruction of the trajectory of the ant respect its initial position. Code and multimedia resources are available here.
The robot designed in [1] allowed to extend the study of the motion of insects for longer times and wider regions. The robot, keeping a proper distance from the insect, continuously moves to preserve the insect always in the scene recorded by its camera.
However, the fact of having both, the insect and the camera, moving at the same time, introduces additional complications while reconstructing the trajectory from a video source. yupi handles the motion of the camera naturally as part of the TrackingScenario.
In this example, it is shown how to reproduce the results of the original paper using one of the videos originally used by the authors.
- The example is structured as follows:
Note
You can access the script of this example on the yupi examples repository.
1. Setup dependencies
Import all the dependencies:
from yupi.graphics import plot_2d
from yupi.tracking import (
ROI,
CameraTracker,
ColorMatching,
ObjectTracker,
RemapUndistorter,
TrackingScenario,
)
Set up the path to multimedia resources:
video_path = 'resources/videos/Serrano2019.mp4'
camera_file = 'resources/cameras/gph3+1080-60fps-MEDIUM.npz'
2. Tracking tracking objects
As in the previous example, we create an instance of an Undistorter:
undistorter = RemapUndistorter(camera_file)
Then, we initialize a tracker for the camera:
camera = CameraTracker(ROI((.65, .65), ROI.CENTER_INIT_MODE))
And a tracker for the ant using ColorMatching algorithm:
algorithm = ColorMatching((20,20,20), (65,65,65))
ant = ObjectTracker('ant', algorithm, ROI((120, 120), scale=0.75))
Next, we create a TrackingScenario with the ant tracker, the tracker for the camera and the Undistorter:
scenario = TrackingScenario([ant], camera, undistorter, preview_scale=0.75)
Then, we track the video using the configured scenario.
retval, tl = scenario.track(video_path, pix_per_m=6300)
3. Results
Now, we can produce a plot quite similar to the one of the original paper [1]:
plot_2d(tl)